Cool Tips About How To Build A Robotic Leg

Robot X #2 | Legs & Hips James Bruton - Youtube

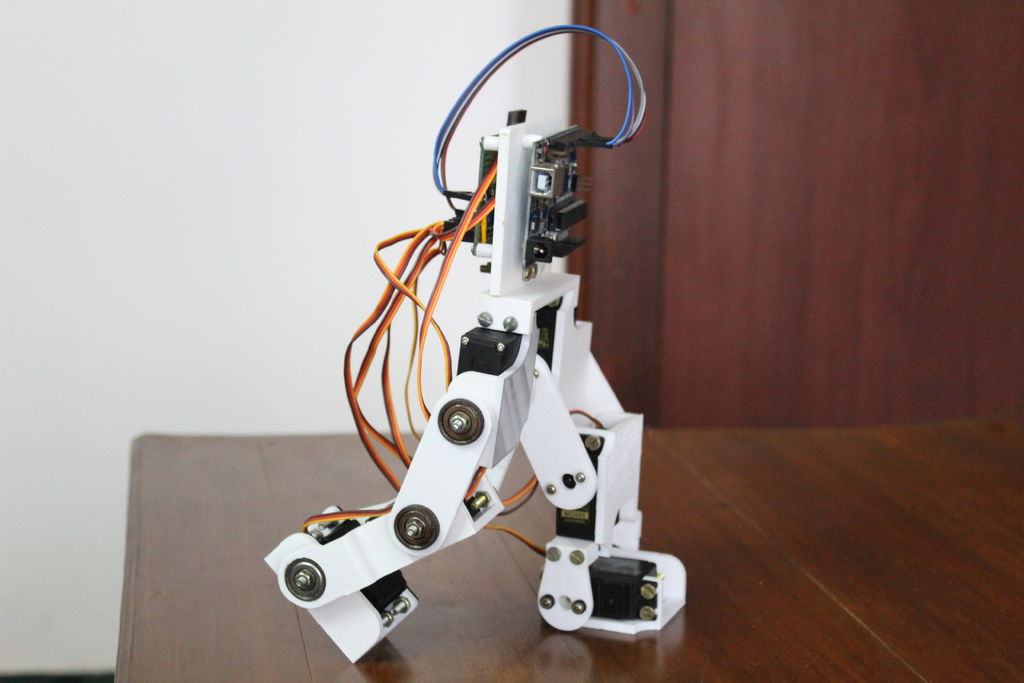
Build A Simple Walking Robot Leg : 6 Steps (with Pictures) - Instructables

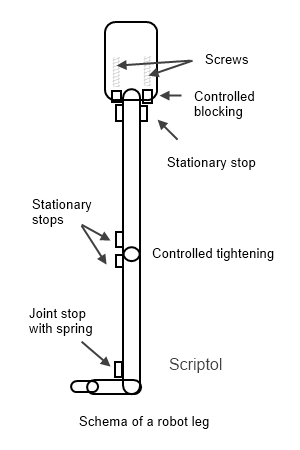
Basic Structure Of Leg-robot | Download Scientific Diagram

How To Make A Robot | Robotic Legs Leg Assembly Easy Best School Project - Youtube

Robotic Legs - Instructables

Building Robots That Can Go Where We - Ieee Spectrum
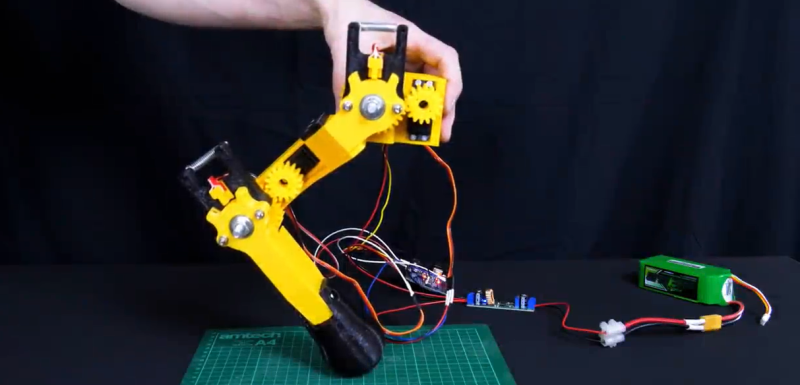
These will later run out of the leg to the motor controller for the knee joint.
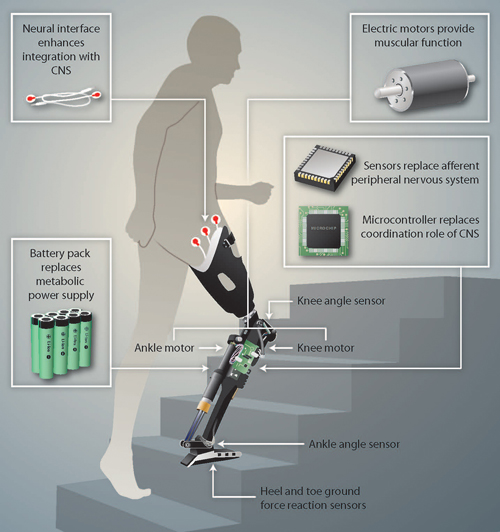
How to build a robotic leg. That is not a simple question to answer. A new robotic prosthetic leg prototype offers a more natural gait while also being quieter and more energy efficient than other designs. This concept has got legs… literally.
Gather the 4 leg lifter modules & the 4 leg rotator modules. A robotic device can be controlled by many different types of computers, anything from a small. How to build a robot:
For each servo in the legs set the low values to make the robot. Connect the encoder to the leg shell using 4 m2.5 screws. Get an arduino robot kit like pirate:
We have also developed simple and comprehensive physics models to explain. A mixed team from eth zurich and the hsr university of applied sciences rapperswil is now working on the completion of the. Set the input channel high value with the value picker to where you want the joystick axis to be when the robot is standing.
The key is the use of new small and. The current exoskeleton was developed as a student project. Making and operating robot legs is a lot tricker than using wheels, as you’ll need to create flexible leg joints and add a servo motor to each.
You will have to either buy robot parts or assemblies or build them from scratch which is often the cheaper way to go. In each case, we discovered sensitive dependence of movement on these locomotor and ground parameters. How do you programme a robot?
Making The Legs Of A Robot
Sensors | Free Full-text On The Biomimetic Design Of Agile-robot Legs

How To Make A Two Legs Walking Robot - Youtube
Compliant Quadruped Legs Using Servos | Hackaday

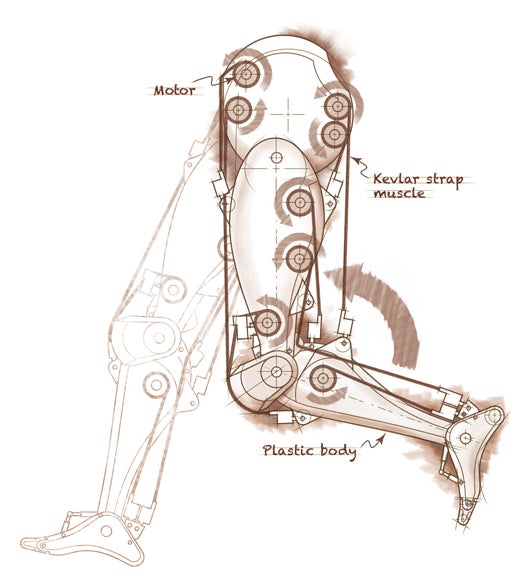
Robot Leg | Design Sketch, Concept Art,

Robotics - Wikipedia
The Future Of Robotic Leg | Science News

Make A Robotic Leg, Hd Png Download , Transparent Image - Pngitem

A More Comfortable Robotic Prosthetic Leg | Michigan Robotics
Rough Sketch: "we Made A Robot That Moves Like Person" | Popular Science

This Birdlike Robot Uses Thrusters To Float On Two Legs | Wired
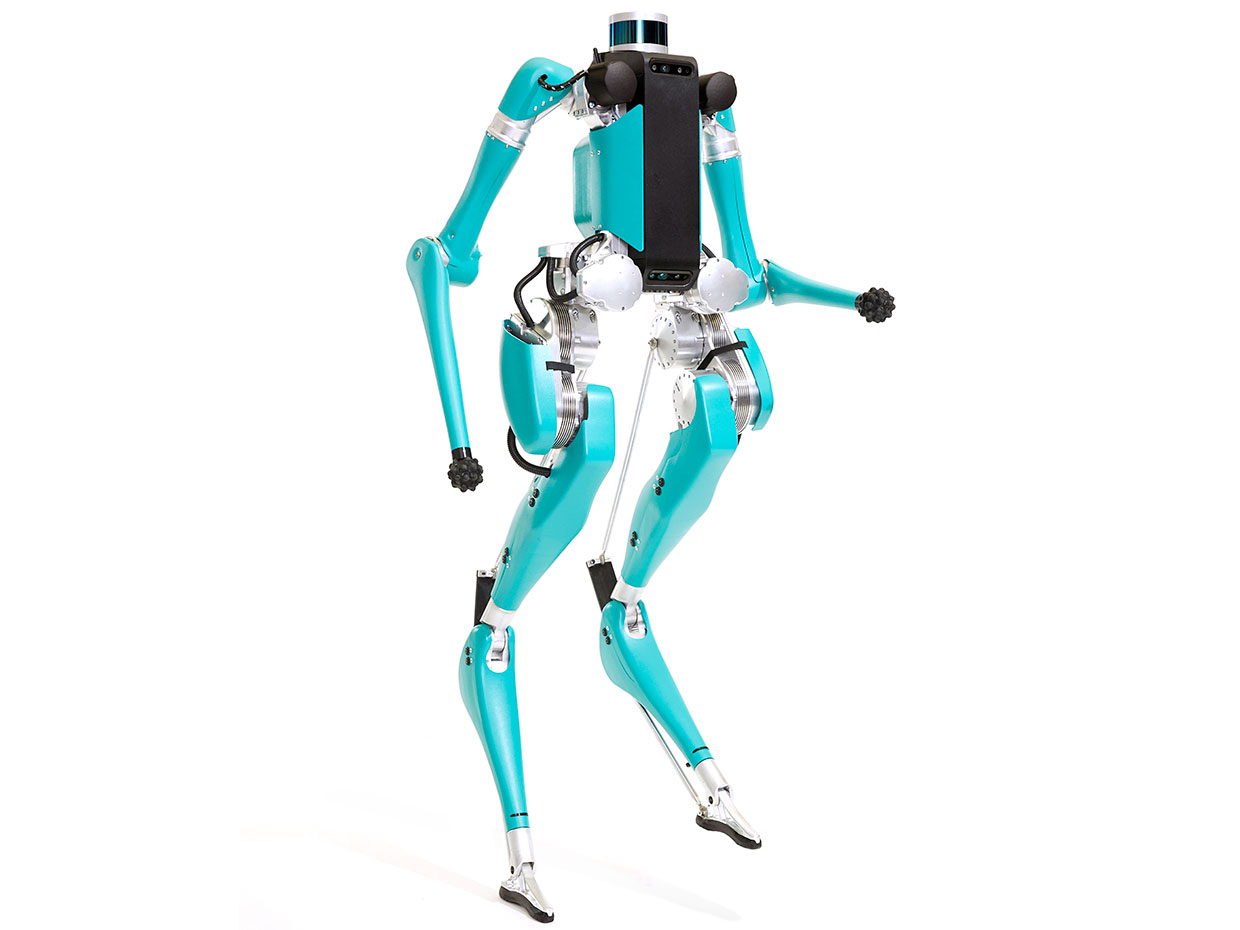
Building Robots That Can Go Where We - Ieee Spectrum
Building An Arduino-based Bipedal Bot | Arduino Blog
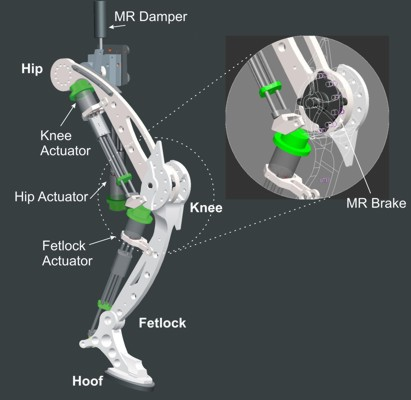
![Leg-Robot Using Mr Devices; (A) Mr Fluid Clutch [20,21]; (B) Mr Fluid... | Download Scientific Diagram](https://www.researchgate.net/publication/328313091/figure/fig3/AS:682356688039938@1539697920222/Leg-Robot-using-MR-devices-a-MR-fluid-clutch-20-21-b-MR-fluid-damper-22.png)